The Game
|
Relic Recovery is definitely one of the more challenging games that were created by FIRST. The primary objective of this game is to stack foam blocks, called glyphs, into a shelf known as a cryptobox. Points are rewarded based on the number of rows, columns, and number of blocks stacked. If a team manages to fill the cryptobox and create a pattern, additional points are rewarded.
A secondary objective requires teams to pick up yellow figures, known as relics, and score them outside of the playing field. The further away from the field they are scored, the more points are rewarded. |
|
Season Achievements

- Redwood City Qualifier Finalist Alliance Captain
- Redwood City Qualifier 2nd place Inspire Award
- Redwood City Qualifier Rockwell Collins Innovate Award
- Burlingame Qualifier Finalist Alliance
- Burlingame Qualifier Rockwell Collins Innovate Award
- Napa Qualifier Finalist Alliance Captain
- Napa Qualifier Connect Award
- Napa Qualifier 3rd place Inspire Award
- NorCal Regional Championship Finalist Alliance Captain
- 17th place in Cascade Division in West Super Regionals
- 11th place in Franklin Division in Houston World Championship
Our Robot
Iteration 1
|
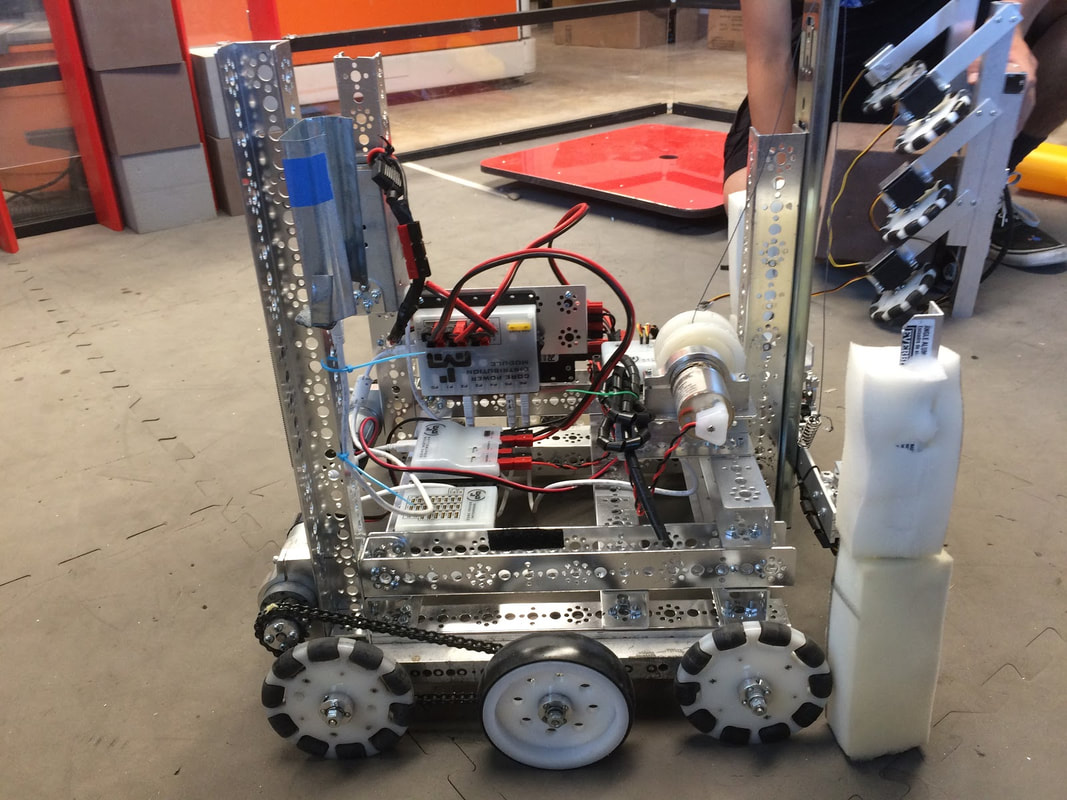
When the season began, we brainstormed many different methods on how we were going to design our robot. One particular solution was based on a chopstick design, where we would have two appendages attached to two servos, which would move at the same time to grip glyphs. We made our own custom parts using materials that we bought from The Home Depot and Michaels in order to give us greater flexibility over the dimensions of each of the part. Although we designed this glyph intake mechanism on our own, we ultimately made the decision to mount it to last year’s robot chassis. This was because we knew that our current design was only a prototype, and we intended on improving it later in the season.
|
|
Iteration 2
|
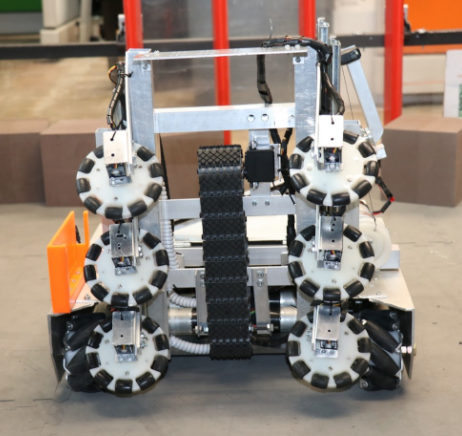
Soon after our first iteration of the robot, we realized that a chopstick design like that might not have been the most efficient method. So, we built a new robot, Rian. This design used 6 omni-wheels to intake and elevate the glyphs by spinning inwards and using a conveyor belt at the back to lift them up. With this method, we can collect 2 glyphs at once, instead of the last method in which only one glyph could be grabbed. We also used mecanum wheels so we could maneuver sideways, which helped us insert glyphs into the cryptobox. However, one issue with this design was that the robot would have to be exactly perpendicular to the glyphs to collect them, taking precious time away from collecting more. Another problem was that it was hard to fit glyphs into the cryptobox properly, and the glyphs would fall out sometimes. Even with these problems, the robot was still very successful, and we qualified during our first game at Sequoia High School.
|
|
Iteration 3
|
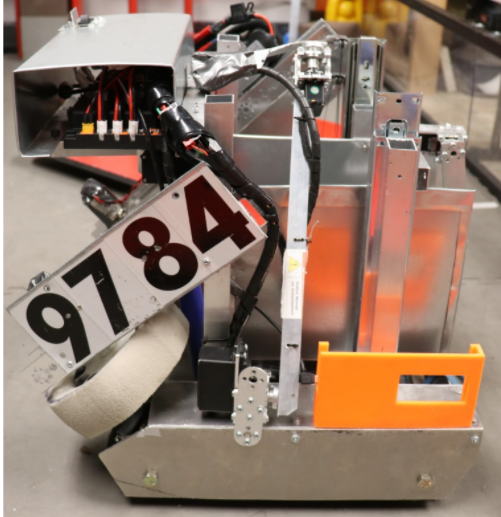
Because of the issues of our 2nd iteration of the robot, we decided to build a new robot called Harvester. This design contains a spinning foam wheel and a conveyor belt system to collect glyphs. One advantage of this design was that the wheels could collect a glyph even when the robot isn't exactly perpendicular, unlike Rian, the earlier robot. This improvement saves much more time that would have been used to line up the robot perfectly with the glyph. Because of this improvement, the robot can pick up 2 extra glyphs during the autonomous period much more often, as the orientation of the glyph to the robot doesn't matter, which improves the chance of collecting more glyphs. However, there were some problems with this version. For example, a disadvantage of this robot was that a glyph could easily get jammed between the foam wheel and the conveyor belt, which meant that we had to dump it back out and collect it again, taking up time that could be used to collect more glyphs. Another problem with the robot was caused as a result of the large collection system. Because of the large collection system, there was no space for a relic arm. Even with these problems, Harvester was still better than our earlier iterations, as it could normally do a full cryptobox.
|
|
Iteration 4
|
To resolve Harvester's problems, we built a new robot, Harvester 2.0. This robot uses conveyor belts on the side to intake glyphs, and instead of using a conveyor belt below to drop the glyph off, we used a "dump truck" style of depositing. We found that the foam wheels on the Harvester would often contribute to jamming the glyph inside, so we decided to use a conveyor system instead. We used a "dump truck" depositing system because it took up less space than the conveyor belt we had before. This extra space allows for a relic arm to be attached to Harvester 2.0. However, because of the extra mechanisms, this design needs to go through maintenance more than usual.
|

|
Season in Review
|
This season, we built a total of 5 robots, each improving upon the foundation of the previous design. Through our perseverance, and effort, we were able to qualify for the Houston World Championship. Attending this event was a tremendous honor for our team, as not only was it our first time, but it proved that as a team, we were able to act as one cohesive unit to exceed our goals.
With our newfound reputation, we hope to further strengthen our efforts in the field of outreach in order to educate and inspire those who have a passion for STEM and robotics. |
|
