The Game.
|
This season's game has many ways to score. There are certain optimized strategies to score the most points.
In the Autonomous period, robots score points by: 1. Identifying the correct randomization and parking in the correct signal zone. 2. Deposit cones onto junctions. TeleOp 1. Depositing cones on high, middle, and ground junctions. Endgame: 1. Scoring circuits. 2. Getting ownership of junctions. 3. Capping junctions with signal beacons. 4. Park |
|
Season Achievements
- Peninsula League Tournament Inspire 3rd
- Peninsula League Tournament Think Award Winner
- Peninsula League Tournament Winning Alliance
Our Robot
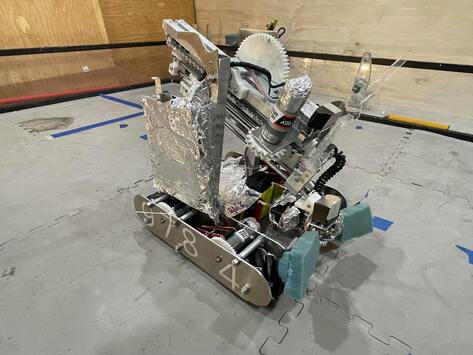
Zamboni, the first iteration of the Power Play robot, was designed to maximize efficiency and consistency. Our team was able to accomplish this by integrating a multitude of different systems, avoiding unnecessary stages and maintaining consistency. Furthermore, we were able to predetermine the sizes, locations, and functionality of certain parts through digital sketches and CAD assemblies. As a result, Zamboni consists of completely customized parts, allowing us to create a unique and methodical design.
Our primary design principle is DRY ICE (Don't Repeat Yourself, Innovate Creative Engineering). We use this principle to make an efficient robot that constantly innovates and improves. We also use SWOT Analysis to iterate each design and constantly improve our robot.
The most essential component of the robot is the slider. An integral part of the slider that allows it to be consistent and very fast as well. We did this by minimizing friction and integrating all the parts of the slider together using 3d printed mounts. This allows us to get a 2.5 second cycle time and place more than 19 cones during TeleOp. It also allows our robot to place cones without having to move our robot at all. Attached to the slider is the claw which is both efficient as it maximized friction on the cones. Additionally, our chassis has a robust construction that supports all the mechanisms on our robot and is fast enough to perform well at competition. One of the essential parts of our chassis is the odometry system which is custom 3D designed to efficiently map our autonomous.
Unlike many other robots in FTC and FIRST, Zamboni is completely customized using 3D printing, CAD, and CNC. More than 80% of our robot is 3D designed and planned out in OnShape. This allows our robot to have complexity and flexibility in certain components and robustness in other mechanisms. Zamboni also adheres to the KISS (Keep It Simple Stupid) principle, a software concept which emphasizes the simplicity. A robust, yet effective design, allows for reliability and consistency.
Our primary design principle is DRY ICE (Don't Repeat Yourself, Innovate Creative Engineering). We use this principle to make an efficient robot that constantly innovates and improves. We also use SWOT Analysis to iterate each design and constantly improve our robot.
The most essential component of the robot is the slider. An integral part of the slider that allows it to be consistent and very fast as well. We did this by minimizing friction and integrating all the parts of the slider together using 3d printed mounts. This allows us to get a 2.5 second cycle time and place more than 19 cones during TeleOp. It also allows our robot to place cones without having to move our robot at all. Attached to the slider is the claw which is both efficient as it maximized friction on the cones. Additionally, our chassis has a robust construction that supports all the mechanisms on our robot and is fast enough to perform well at competition. One of the essential parts of our chassis is the odometry system which is custom 3D designed to efficiently map our autonomous.
Unlike many other robots in FTC and FIRST, Zamboni is completely customized using 3D printing, CAD, and CNC. More than 80% of our robot is 3D designed and planned out in OnShape. This allows our robot to have complexity and flexibility in certain components and robustness in other mechanisms. Zamboni also adheres to the KISS (Keep It Simple Stupid) principle, a software concept which emphasizes the simplicity. A robust, yet effective design, allows for reliability and consistency.
